Позже появились безрамочные стереотаксические системы — более сложные и при этом более удобные для пользователя устройства, обеспечивающие сопоставимую стереотаксическую точность без использования вышеупомянутой рамки, привинчивающейся к голове пациента. Существующие системы состоят из двух основных компонентов: датчика, который передает информацию о местоположении, и компьютера, который переводит информацию о местонахождении датчика в графический вид для проверки анатомических данных в реальном времени. В безрамочном стереотаксисе преобразование томографических координат в стереотаксические координаты определяется тремя или более не лежащими на одной прямой (координатными) точками, общими для этих двух системам координат.
В зависимости от технологии, лежащей в основе датчика, эти опорные точки могут включать анатомические ориентиры или опорные метки, прикрепленные к голове на твердых и неподвижных местах.
Для преобразования координат в хирургическом поле к соответствующему пространству томограммы использовалось множество трехмерных цифровых преобразователей или датчиков различного устройства. Такие приборы могут разделяться на две большие группы: с механической связью между указателем и датчиком (системы с механическим звеном) и не требующие такой связи (немеханические системы).
а) Механически связанные/контактные системы. Основой систем с механической связью являются манипуляторы, устанавливаемые на операционном столе. Эти механические манипуляторы оборудованы чувствительными потенциометрами или датчиками углового положения, в местах соединений. Посредством сбора выходных данных ротационных оптических кодирующих устройств в каждой точке компьютер может определить положение верхней точки манипулятора и выдать «координаты манипулятора», отсчет которых ведется от его основания. Поскольку основание манипулятора механически связано с головой, а голова пациента совмещена с томограммой головы, могут быть выполнены вычисления для преобразования, необходимого для нанесения на схему общих точек этих двух систем координат. В хирургических целях в режиме реального времени можно определить положение наконечника манипулятора или указателя относительно дооперационных томограмм.
В продаже имеется множество устройств с механическими связями. Эти устройства доказали свою точность, хотя и являются до некоторой степени громоздкими и ограничивают свободу действий, в зависимости от размера высокоточных датчиков углового положения на шарнирах. В целом эти системы менее универсальны и не столь удобны, как более актуальные бесконтактные системы (не механически связанные/ дистанционные/бесконтактные системы). В настоящее время в отиатрии и отонейрохирургии они используются ограниченно.
Пассивный хирургический инструмент,
используемый в оптоэлектрической системе (LandMarx, Medtronic/Xomed, Inc).
б) Дистанционные/бесконтактные системы. Совсем недавно были разработаны дистанционные/бесконтактные сенсорные системы для регистрации данных томографии у хирургических пациентов. Эти системы полагаются на активное или пассивное обнаружение сигналов, генерируемых различными излучателями, которые прикреплены к хирургическим инструментам.
При использовании сходных традиционных принципов триангуляции спутниковой навигации, эти безрамочные стереотактические системы в состоянии локализовать и отслеживать положение хирургических инструментов в трехмерном пространстве. Есть три основных дистанционных вида систем оцифровки: ультразвуковые, электромагнитные и оптоэлектронные.
Ультразвуковые цифровые преобразователи определяют положение, измеряя время распространения звука от излучателя по крайней мере к трем микрофонам. Главное преимущество ультразвуковых цифровых преобразовательных систем состоит в том, что не нужно поддерживать свободную оптическую ось между датчиком и излучающей антенной. Отличительным недостатком ультразвуковых цифровых преобразователей является изменение скорости звука в зависимости от градиентов температуры и влажности, которые могут привести к погрешности в определении местоположения. Кроме того, ультразвуковые цифровые преобразователи могут быть скомпрометированы эхом в операционной или помехами от постороннего радиочастотного излучения. По этим причинам ультразвуковые системы навигации больше не используются.
Электромагнитные навигационные системы (например, InstaTrak System, GE Medical Systems, Lawrence, Massachusetts) имеют сходные преимущества с ультразвуковыми цифровыми преобразователями в том смысле, что при их использовании нет необходимости поддерживать свободную оптическую ось между датчиком и излучающей антенной. Эти системы имеют привязку к гарнитуре, которая надевается пациенту на голову во время компьютерной томографии и позднее во время операции. Регистрация этого устройства более быстрая и простая, чем у других коммерчески доступных безрамочных систем. Однако электромагнитные навигационные системы имеют определенный недостаток, заключающийся в вероятности возникновения помех от сторонних электромагнитных систем, а также от отдельных видов ферромагнитной аппаратуры в операционной. Эти помехи, а также незначительные несоответствия при изменении положения гарнитуры при томографии и операции способствует ошибке и погрешности в определении местоположения.
Такие погрешности относительно незначительны и несущественны для большей части хирургии передних отделов основания черепа (например, эндоскопической хирургии околоносовых пазух), где эта система находит свое основное применение в оперативной оториноларингологии. Автоматическая регистрация гарнитуры и алгоритм навигации в настоящее время недостаточно подходят для вмешательств на боковых отделах основания черепа.
Оптоэлектрические цифровые преобразователи требуют отсутствия препятствий на пути от излучателей к вышележащей антенне камеры. Три камеры, содержащие 1 х 4096 элементов линейной ПЗС-матрицы, требуются для определения трехмерного положения инфракрасных светодиодов (LEDs), прикрепленных к хирургическим инструментам. Вышележащая антенна камеры помещается на высоте 1,5-2 м над хирургическим полем так, чтобы она могла отследить прикрепленные к инструменту светодиоды, таким образом она обнаруживает и отслеживает точное положение хирургического инструмента в трехмерном пространстве. Многочисленные светодиоды могут размещаться на различных хирургических инструментах. У каждого инструмента есть уникальный шаг расположения излучателей, и программное обеспечение в состоянии распознавать и различать различные инструменты на основании расстояния между парами излучателей.
Оптоэлектрические навигационные системы определяются как активные или пассивные, в зависимости от способности опорных точек инструмента активно передавать или пассивно отражать среду датчика (т.е. инфракрасное излучение). Активные системы обычно требуют проводного подсоединения инструментов, в отличие от пассивных систем.
Электромагнитная навигационная система (InstaTrak, VTI, Inc).
Три коммерчески доступных оптоэлектрических системы (LandmarX, Medtronic Xomed, Миннеаполис, Миннесота; BrainLAB, Фельдкирхен, Германия; навигационная система Страйкера, Stryker Leibinger, Каламазу, Мичиган), довольно понятны и адаптированы к различным хирургическим инструментам разных геометрических конфигураций, таким как биполярный каутер, различные аспираторы, микродебридер с вращающимся наконечником и прямые или изогнутые зонды. Контрольная дуга, прикрепленная к зафиксированной голове, позволяет корректировать калибровку при случайных движениях операционного стола или вышележащей антенны камеры. Трехмерные и трехплоскостные реконструкции блока данных отображаются на видеомониторе, обеспечивая оперирующего хирурга интерактивной информацией о местоположении в режиме реального времени.
Три вышеупомянутых коммерчески доступных системы теперь относятся к контурным, это означает, что пациент не должен надевать опорные маркеры во время предоперационной томографии. Регистрация данных томографии относительно хирургического поля достигается путем сопоставления анатомических контурных опорных точек с соответствующими точками томографии, используя контурный зонд. Недавно в рамках систем BrainLAB и LandmarX был разработан новый метод регистрации при помощи лазерного контура, при котором контактный зонд не используется. Присоединив светодиоды к лазерному дальномеру и перемещая дальномер над частью головы с анатомическим разнообразием (такой как лоб), можно получить сотни точек, составляющих контур. Этот контур затем сопоставляется с соответствующим контуром головы, извлеченным из набора данных томограмм. Такой метод регистрации уменьшает время настройки, значительно снижая погрешности при регистрации.
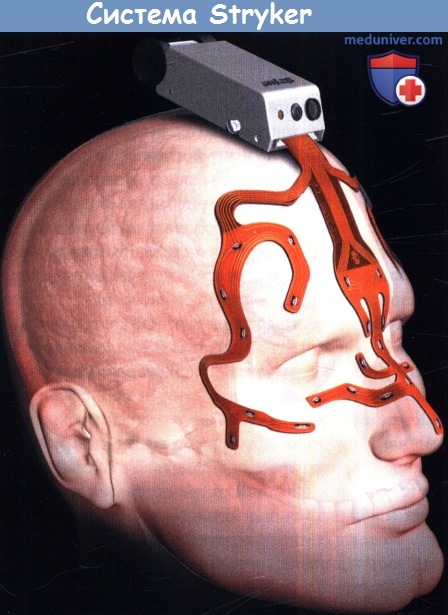
В системе Stryker регистрация контура достигается посредством интраоперационного использования лицевой «маски», которая накладывается в области лба, носа и верхней части щеки. Излучение инфракрасных светодиодов воспринимается накладной чувствительной матрицей, и компьютер производит автоматическую регистрацию набора данных томографии относительно хирургического поля. Эта последняя регистрация может быть использована для исследования структур латеральной части основания черепа путем регистрации координат контуров латеральных структур черепа с помощью контурного зонда.
В настоящее время все три оптоэлектрические навигационные системы могут объединять данные КТ и МРТ в «комплексное» изображение для выполнения интраоперационной навигации. Таким образом, объединяются относительные преимущества КТ (лучшее разрешение костных границ) с МРТ (лучшее контрастирование мягких тканей). Получаемые объединенные сканы более полезны при вмешательствах на границе основания черепа и мозга, таких как операции на гипофизе, устранение повреждений кавернозного синуса и удаление опухолей основания черепа с внутричерепным распространением.
Обобщая вышесказанное, автор считает, что эти оптоэлектрические навигационные системы (BrainLAB, LandmarX и Stryker) являются самыми точными из безрамочных стереотаксических систем. Современные регистрационные алгоритмы лучше подходят для навигации в области латеральных отделов основания черепа, чем алгоритмы электромагнитной системы (InstaTrak). Эта электромагнитная навигационная система является весьма полезной для использования на передних отделах основания черепа, например, при эндоскопической хирургии околоносовых пазух, но плохо подходит для вмешательств на латеральных отделах основания черепа.
Электромагнитные системы имеют преимущество быстрой и простой регистрации, но у них есть недостаток — необходимость надевать пациенту достаточно неудобную гарнитуру для выполнения предоперационной томографии. Регистрация опорных точек для оптоэлектрических систем ранее была проблематична, но благодаря вышеупомянутым автоматизированным схемам регистрации контура ее выполнение было значительно облегчено. Сохранение свободной оптической оси с расположенной над операционным полем антенной камеры оптоэлектрических систем может также быть затруднено при отиатрических/отонейрохирургических вмешательствах, в зависимости от размера и ориентации операционного микроскопа в хирургическом поле. Последний недостаток в меньшей степени характерен для электромагнитных систем, поскольку они не требуют свободной оптической оси между воспринимающей антенной и датчиком.
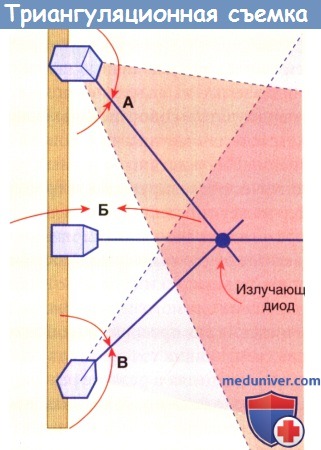
В оптоэлектрических системах триангуляционную съемку местоположения хирургических инструментов,
основанную на угле падения светового пучка, полученного от инфракрасных светодиодов, прикрепленных к хирургическим инструментам, выполняют три камеры.
В системе Stryker регистрация контура достигается посредством интраоперационного использования лицевой «маски», которая накладывается в области лба, носа и верхней части щеки.
Излучение инфракрасных светодиодов воспринимается накладной чувствительной матрицей, компьютер производит автоматическую регистрацию набора данных томографии относительно хирургического поля.
Эта последняя регистрация может быть использована для исследования структур латеральной части основания черепа путем регистрации координат контуров латеральных структур черепа с помощью контурного зонда.