Техника транспедикулярной фиксации позвоночника и варианты введения педикулярных винтов
Транспедикулярная стабилизация может применяться на любом уровне позвоночного столба, в т.ч. на уровне шейного отдела позвоночника, в частности на уровне С2 и С7, однако чаще всего эта методика используется для стабилизации грудного и пояснично-крестцового отделов позвоночника. Существует несколько открытых и чрескожных методик установки педикулярных винтов.
Наиболее часто используется методика, предполагающая введение винтов под контролем интраоперационной флюороскопии. Другими методиками являются методика «свободной руки», не предполагающая интраоперационной визуализации, методика введения под контролем электромиографии (ЭМГ) и методика введения с использованием лучевой или компьютер-ассистированной навигации. Применение каждой конкретной методики зависит, главным образом, от предпочтений хирурга, его опыта и степени комфорта при работе с тем или иным специальным оборудованием.
Одна из лучших клиник в России которая выполняет процедуру - транспедикулярная фиксация позвоночника SL Клиника и ведущие нейрохирурги, травматологи Шаболдин А.Н. (КМН) и Барченко Б.Ю..
а) Техника свободной руки при введении педикулярных винтов. Применение техники «свободной руки» основывается исключительно на опыте хирурга и его понимании пространственного расположения точки ввода и траектории введения винтов. Интраоперационная визуализация при этом используется лишь иногда или не используется вовсе, следовательно, применение данной техники возможно лишь при открытых вмешательствах. Точность введения винтов можно увеличить за счет непосредственной визуализации и пальпации медиальных стенок каждого из корней дуг, например, после декомпрессии спинномозгового канала.
Точность методики в целом может варьировать в самых широких пределах, что зависит в первую очередь от личного опыта и навыков оперирующего хирурга.
Техника «свободной руки» предполагает использование хирургом естественных анатомических ориентиров в пределах операционного поля, которые позволили бы правильно локализовать точку введения педикулярного винта на уровне каждого из корней дуг. После того как необходимая точка будет локализована, с помощью кусачек или бора в этой точке выполняется декортикация. В эту точку устанавливается прямой или изогнутый педикулярный зонд. Прежде чем погрузить зонд в толщу корня дуги, хирург должен оценить необходимую траекторию его введения как в сагиттальной, так и в поперечной плоскости.
Зонд погружается достаточно медленно, постоянными вращательными движениями и при небольшом давлении на него, хирург при этом должен пользоваться своей доминантной рукой. Тупой рабочий конец зонда сконструирован таким образом, чтобы риск перфорации зондом кортикальной стенки корня дуги был минимальным. Не следует при введении зонда прилагать избыточное усилие, в противном случае зонд может перфорировать тело позвонка или привести к перелому корня дуги.
Таким образом с помощью зонда формируют канал для введения педикулярного винта, после чего зонд извлекают. Следующим этапом в канал вводят щуп, с помощью которого оценивают целостность кортикальных стенок корня дуги и необходимую длину педикулярного винта. Если целостность корня дуги не нарушена, то в канале формируется резьба и вводится педикулярный винт необходимой длины. Если в одной из кортикальных стенок корня дуги обнаруживается дефект, то зонд вводится вновь и предпринимается попытка скорректировать траекторию канала.
После того как будут сформированы каналы в каждом из корней дуг, которые подлежат стабилизации, в каждый из каналов вводится спица Киршнера или педикулярный маркер, и только тогда с тем, чтобы убедиться в правильности их расположения, выполняется интраоперационная рентгенография.
Техника «свободной руки» наиболее подходит тем хирургам, кто уже имеет достаточный опыт операций на позвоночнике. В дополнение к четкому представлению о пространственной ориентации костных элементов позвонков и их взаимоотношениях с расположенными здесь же нервными образованиями и другими мягкотканными структурами использование данной техники требует от хирурга строго дозированного приложения собственных усилий при введении зонда в каждый из корней дуг позвонков. Некорректный выбор точки введения зонда может стать причиной повреждения стенки корня дуги, что может сделать установку сюда педикулярного винта невозможной.
Karapinar в своей работе провел анализ точности введения 640 педикулярных винтов на разных уровнях грудного и поясничного отдела позвоночника с использованием описанной техники «свободной руки»: на основании данных послеоперационной КТ автор выяснил, что в 37 случаях (5,8%) имело место повреждение стенок корней дуг. Похожие данные были получены и Amato: число последовательно установленных с использованием описанной техники педикулярных винтов в его работе составило 424, а уровень погрешности в точности их введения составил 5%. Чаще всего погрешности были связаны с излишне латеральным введением винтов, причем эти погрешности обычно наблюдались на уровне L3 позвонка (11%).
Относительно недавно Parker et al. опубликовали работу, посвященную анализу точности введения 6816 последовательно установленных с использованием техники «свободной руки» педикулярных винтов. Авторы выяснили, что чаще всего погрешности введения винтов были связаны с перфорацией наружной стенки корней дуг. На уровне поясничного отдела позвоночника число таких погрешностей составило 0,9%, тогда как на грудном уровне оно оказалось уже 2,5%. Наиболее низкое число погрешностей введения винтов зафиксировано на уровнях L5 и S1 позвонков. Хотя представленные данные и свидетельствуют об относительно невысоком числе ошибок при введении педикулярных винтов, они говорят о том, что даже при постоянном применении данной методики добиться абсолютной точности введения винтов очень и очень непросто.
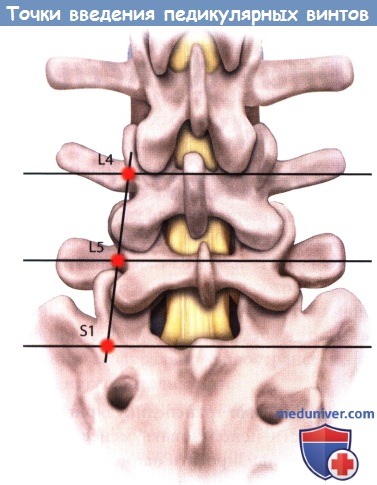
Схема расположения точек введения педикулярных винтов на уровне L4, L5 и S1.
б) Техника введения педикулярных винтов под флюороскопическим контролем. Это наиболее часто применяемая техника введения педикулярных винтов. Как и при введении винтов методом «свободной руки», здесь хирург также должен понимать и представлять расположение поверхностных костных ориентиров и траекторию введения педикулярных винтов. Однако в отличие от техники «свободной руки» интраоперационная флюороскопия позволяет увеличить точность проведения винтов, что достигается за счет того, что у хирурга появляется возможность в режиме реального времени контролировать процесс формирования каналов и введения винтов.
Перед введением винта С-дуга устанавливается для выполнения флюороскопии в боковой проекции, что позволит хирургу выбрать оптимальную траекторию введения винта в сагиттальной плоскости. Также желательно обеспечить возможность ротации С-дуги во время операции для выполнения флюороскопического контроля в прямой и косых проекциях. Это позволит, в свою очередь, оптимизировать траекторию введения винта в аксиальной плоскости.
Точку введения винтов локализуют с использованием стандартных костных ориентиров, после чего в этой точке устанавливается педикулярный зонд. Оптимальная траектория введения зонда в сагиттальной плоскости определяется на основании данных флюороскопии в боковой проекции. Зонд под контролем флюороскопии осторожно погружается в поверхностную часть корня дуги. С-дуга переводится в положение прямой проекции: в прямой проекции зонд не должен быть направлен слишком медиально. При удовлетворительном положении зонда он погружается на всю необходимую глубину и затем извлекается, целостность костных стенок корня дуги оценивается с помощью щупа.
После того как на всех необходимых уровнях будут сформированы все каналы, в них вводят рентгеновские маркеры или просто спицы Киршнера и выполняется последняя перед введением винтов рентгенография в прямой и боковой проекциях.
Использование флюороскопического контроля при открытом транспедикулярном спондилосинтезе является опциональным, тогда как при использовании перкутанной техники он является обязательным. Отсутствие непосредственного визуального контроля при использовании перкутанной техники делает ее полностью зависимой от флюороскопического контроля. Причем лучше для этого использовать одновременно две С-дуги: одна из них настраивается для выполнения контроля в боковой, а другая — в прямой проекции. С-дуга, используемая для контроля в прямой проекции, наклоняется в направлении головы пациента, что позволит обеспечить хирургу более оптимальный доступ к операционному полю.
Перед началом операции с тем, чтобы убедиться в правильном расположении С-дут, выполняют рентгенографию в обеих проекциях. С помощью какого-либо металлического инструмента под контролем флюороскопии на коже маркируют оптимальные точки для введения винтов.
На сегодняшний день на рынке представлены несколько различных систем для чрескожной транспедикулярной стабилизации позвоночника, и каждая из этих систем имеет определенные технические особенности. Операция начинается с введения через прокол кожи в паравертебральные мягкие ткани иглы Джамшиди и погружения ее до точки входа в корень дуги позвонка. Адекватность выбранной точки входа в сагиттальной и аксиальной плоскостях оценивается флюороскопически в прямой и боковой проекциях. Следующим этапом игла погружается в толщу корня дуги и продвигается в тело позвонка. По мере погружения иглы траектория ее введения постоянно контролируется флюороскопически.
По достижении удовлетворительного положения иглы из нее извлекается стилет и вместо него вводится спица Киршнера. При желании следующим этапом по спице вводится защитник мягких тканей и метчик, с помощью которого в корне дуги нарезается резьба. Метчик извлекается и вслед за ним по спице вводится педикулярный винт. Процесс введения винта, глубину и траекторию его введения контролируют флюороскопически. При формировании резьбы и введении винта надо постоянно контролировать положение направляющей спицы: она должна оставаться в пределах тела позвонка до того момента, пока винт не достигнет вентральной границы корня дуги. Любые манипуляции со спицей должны проводится под флюороскопическим контролем, после введения винта в тело позвонка спицу можно удалить.
По завершении установки всех педикулярных винтов их, в соответствии с рекомендациями производителя фиксатора, соединяют стержнями необходимой длины.
Вне зависимости от используемого хирургического доступа в ряде ранее проведенных исследований были отмечены погрешности флюороскопии как метода контроля проведения педикулярных винтов. Согласно этим исследованиям, число повреждений кортикальных стенок корней дуг позвонков при введении винтов составляло от 15 до 31%. Недостатком флюороскопии в этом отношении является то, что она обеспечивает по большому счету лишь двухмерное изображение. Рентгенограммы в боковой проекции оценивать обычно достаточно легко, чего нельзя сказать о рентгенограммах в прямой и, тем более, в косых проекциях. В большинстве случаев наиболее важным считается положение винта в аксиальной плоскости: именно так можно оценить положение винта относительно стенок спинномозгового канала.
Стандартное флюороскопическое оборудование обеспечить хирурга подобными изображениями не может.
В некоторых случаях флюороскопия не позволяет получить более или менее адекватные по качеству изображения. В частности, флюороскопически контролировать проведение педикулярных винтов на верхнегрудном уровне очень сложно или вовсе невозможно вследствие того, что здесь позвоночник будет экранирован поясом верхних конечностей пациента. Оптимальные по качеству флюороскопические изображения зачастую непросто получить и на пояснично-крестцовом уровне у тучных пациентов.
Отдельной проблемой использования интраоперационной флюороскопии в качестве способа контроля введения винтов, что особенно может касаться перкутанной техники, является облучение, которому подвергаются операционная бригада и пациент. Согласно данным Rampersaud, доза облучения при операциях на позвоночнике по сравнению с другими ортопедическими вмешательствами может порой увеличиваться в 10-12 раз, что связано как с повышением уровня рассеянной радиации, так и с увеличением энергетических характеристик рентгеновского излучения, необходимых для получения рентгеновского изображения поясничного отдела позвоночника. Все это так или иначе создает угрозу для здоровья в первую очередь тех хирургов, которые выполняют большой объем сложных хирургических вмешательств на позвоночнике.
Если в ходе операции используется флюороскопический контроль, то должны быть приняты все необходимые меры защиты от рентгеновского излучения, а время экспозиции должно быть сведено к минимуму.
Интраоперационная рентгенограмма в боковой проекции:
положение маркеров в корнях дуг L3-L5 позвонков в данном случае можно считать удовлетворительным.
в) Техника введения педикулярных винтов с использованием компьютерной навигации. Компьютерная навигация в спинальной хирургии — это хирургическая технология, созданная с целью оптимизации интраоперационной локализации и ориентации относительно невидимых непосредственно глазом анатомических образований, например, при введении педикулярных винтов. Она дает хирургу возможность использовать во время операции многоплоскостные КТ-и флюороскопические изображения в целях более точной ориентации инструментария в операционной ране, повышая тем самым точность вмешательства в целом. Еще одним преимуществом навигации по сравнению со стандартной интраоперационной флюороскопией является избавление от необходимости применения последней или по крайней мере значительное уменьшение экспозиции хирургической бригады рентгеновскому излучению.
Навигационная система для операций на позвоночнике включает в себя рабочую станцию, функцией которой является обработка изображений, и оптическое локализующее устройство, снабженное двумя видеокамерами. Связующим звеном между хирургом и компьютером служит навигационный зонд, которым хирург работает как целеуказателем и который снабжен своего рода антенной, состоящей из отражающих элементов, имеющих форму сфер. Кроме того, пассивные отражающие элементы прикрепляются и к стандартным хирургическим инструментам. Пространственное взаиморасположение и текущая позиция пассивных отражателей на каждом из навигационных зондов или хирургических инструментов отслеживается рабочей станцией.
В процессе навигации оптический локализатор излучает в направлении операционного поля инфракрасный свет, который отражается пассивными отражателями, расположенными на инструментах. Информация передается рабочей станции, которая рассчитывает точное положение рабочего конца инструмента в ране и может определить, где, т. е. на каком анатомическом образовании, этот инструмент находится.
Технология навигации эффективно работает с графическими данными пациента, полученными как до, так и во время операции. Суть этой технологии заключается в том, что как графические данные, так и операционное поле являют собой трехмерные координатные системы. Каждая точка в множестве точек, описывающих графическую информацию об объекте, и каждая точка в зоне вмешательства имеют свое место расположения в пространстве, т.е. имеют свои собственные уникальные координаты (х, у и z в картезианской системе координат). С помощью специальных математических алгоритмов каждая точка в массиве графической информации таким образом может быть «привязана» к соответствующей ей точке в зоне хирургического вмешательства.
После привязки некоторого ограниченного числа таких точек мы можем выбирать уже любую точку в пределах операционного поля, а программа отобразит ее положение во всех трех плоскостях различных анатомических образований, что позволит нам лучше ориентироваться и позиционировать тот или иной инструмент.
Установление пространственной взаимосвязи между графическими данными и реальным операционным полем осуществляется в процессе т. н. «регистрации». Существует три различные техники регистрации:
1) попарная регистрация референсных точек,
2) поверхностная регистрация и
3) автоматическая регистрация.
Попарная регистрация заключается в выборе дискретных анатомических точек в массиве графических изображений, полученных посредством КТ, и привязывании их к соответствующим им точкам операционного поля. В качестве таких анатомических ориентиров обычно выбирают верхушки остистых или поперечных отростков и вершины дугоотростчатых суставов. После выбора такой точки на томограмме навигационный зонд помещается на соответствующую точку операционного поля. Инфракрасный свет, отражаясь от зонда, фиксируется камерами и информация передается компьютеру, который на основании нее вычисляет пространственное положение навигационного зонда и анатомического образования, на котором он располагается в данный момент. Таким образом точка на КТ-изображении «привязывается» к определенной точке операционного поля.
После регистрации как минимум трех таких точек зонд можно помещать на любую другую точку операционного поля и компьютер определит положение соответствующей ей точки на КТ-изображении.
Поверхностная регистрация заключается в выборе множества случайных (недискретных) точек на открытой поверхности позвоночника в пределах операционного поля. Данная регистрация не требует предварительного выбора определенных точек в массиве графической информации, однако для большей точности такого поверхностного картирования выбрать несколько дискретных точек на графических изображениях и соответствующих им точек на поверхности позвонков все же бывает необходимо. Информация о расположении выбранных точек передается рабочей станции, которая создает топографическую карту выбранного участка поверхности операционного поля и привязывает ее к имеющимся графическим данным.
Автоматическая регистрация выполняется при использовании систем флюороскопической навигации или работающих в связке с интраоперационным КТ-сканнером. При использовании данной техники к открытым элементам позвонков (или, при операциях на поясничном отделе позвоночника, к гребням подвздошных костей) фиксируется специальная референсная рамка. Вторая такая рамка крепится к КТ-сканнеру или флюороскопу. По завершении сканирования обе эти рамки позволяют выполнить регистрацию без какого-либо участия хирурга. После этого в дальнейшем использовании КТ-сканнера или флюороскопа уже нет необходимости, а навигация в режиме реального времени может использоваться для вмешательств на пяти отдельных уровнях позвоночника.
На сегодняшний день существует четыре типа компьютер-ассистированных вмешательств на позвоночнике. Навигация на основе КТ использует в работе данные КТ, выполненной до операции. При работе с такой навигацией в дополнительном использовании интраоперационных методов визуализации нет необходимости. В ходе навигации у хирурга в распоряжении постоянно будут находиться реконструированные КТ-изображения в различных плоскостях с выбранными и нанесенными на них точками и траекториями введения винтов. По мере изменения расположения инструментов в зоне вмешательства в режиме реального времени меняется и информация на экране компьютера.
Флюороскопическая навигация использует в работе стандартные рентгеновские изображения позвоночника в прямой и боковой проекциях, полученные непосредственно перед операцией. Дополнительного интраоперационного рентгенологического контроля не требуется, а регистрация выполняется автоматически. Траектория введения винтов наносится на изображения в прямой и боковой проекциях непосредственно на экране рабочей станции (рис. 44-6). В отличие от КТ-навигации здесь у нас нет в распоряжении аксиальных срезов позвонков. Преимуществом флюороскопической навигации является то, что доза излучения здесь ниже по сравнению с обычной флюороскопией, когда она используется в качестве метода интраоперационного контроля, кроме того, в отличие от КТ-навигации здесь не требуется предоперационного КТ-исследования пациента.
Интраоперационная изоцентрическая флюороскопическая навигация является разновидностью стандартной флюороскопической навигации. Рентгеновские снимки здесь получают путем ротации специальной С-дуги в амплитуде 180° вокруг пациента, регистрация происходит автоматически. Полученные изображения затем подвергаются реконструкции с формированием аксиальных и сагиттальных срезов, подобных КТ-изображениям, в предоперационной КТ, однако, здесь необходимости нет. Полученные картинки по сравнению с КТ-изображениями отличаются более низким качеством, однако с целью навигации в большинстве случаев их бывает вполне достаточно.
Наиболее современным методом навигации является интраоперационная КТ-навигация. При этом применяется портативный КТ-сканнер, в основе работы которого лежит использование плоскостного детектора, дающего возможность улучшить качество получаемого изображения. Внешний вид этого сканнера напоминает обычную С-дугу. В этом положении с помощью него можно выполнить стандартные рентгенограммы в прямой и боковой проекциях, однако в дополнение к этому конфигурация «С-дути» может быть переведена в конфигурацию «О-дуги», которая полностью окружает тело пациента и позволяет перемещать детектор вокруг пациента в амплитуде 360°, что значительно улучшает качество получаемого изображения. Реконструированные изображения по качеству сопоставимы со стандартной КТ и превышают информативность изоцентрической флюороскопии. Регистрация осуществляется автоматически, а к использованию навигации можно приступить сразу же после получения изображения.
После регистрации навигационный зонд можно поместить на любую точку поверхности операционного поля. Камеры отследят положение зонда, а рабочая станция рассчитает его расположение относительно заранее выбранных анатомических точек. При использовании КТ-навигации на экран будут выведены три отдельных реконструированных изображения, на каждом из которых будет обозначена соответствующая положению зонда точка. Эти изображения дадут хирургу возможность выбрать правильную точку ввода и траекторию введения винта в сагиттальной, фронтальной и аксиальной проекциях, а также подходящие длину и диаметр винта. При изменении положения и угла наклона зонда в режиме реального времени меняются точка и предполагаемая траектория введения винта на экране рабочей станции. Если используется флюороскопическая навигация, траектория введения будет отображаться на выполненных до операции рентгенограммах в прямой и боковой проекции.
Основываясь на стандартных анатомических ориентирах, хирург должен выбрать подходящие точки введения винтов в каждый из корней дуг позвонков. Навигационный зонд проводится через ручной направитель для сверла и устанавливается на предполагаемую точку ввода. На экране рабочей станции выбирают подходящую траекторию введения винта в сагиттальной и аксиальной плоскостях. Положение и угол наклона направителя изменяют таким образом, чтобы траектория введения винта была оптимальной. После этого зонд удаляют и в направитель вводят сверло диаметром 3 мм, с помощью которого формируют канал необходимой глубины. Целостность стенок канала оценивают с помощью щупа.
Клиническое применение компьютерной навигации в хирургии позвоночника в настоящее время затрагивает достаточно обширный спектр вмешательств, однако точность этих систем первоначально оценивалась именно на примере транспедикулярной стабилизации грудного и пояснично-крестцового отдела позвоночника на трупных препаратах. В первое клиническое исследование, посвященное изучению точности работы системы компьютерной навигации, было включено 30 пациентов, каждому из которых проводилась транспедикулярная стабилизация поясничного отдела позвоночника. Оценка точности введения винтов проводилась по завершении вмешательства на основании стандартной рентгенографии и КТ оперированных сегментов позвоночника. Зафиксировано удовлетворительное положение 149 из 150 установленных винтов.
В ряде других исследований также отмечалась более высокая точность проведения винтов при использовании компьютерной навигации по сравнению с обычной флюороскопией. Во всех этих исследованиях продемонстрировано наличие статистически значимой разницы в отношении точности проведения винтов у пациентов, операция которым проводилась с использованием компьютерной навигации.
д) Электромиографический мониторинг (ЭМГ-мониторинг). Интраоперационный ЭМГ-мониторинг в качестве метода контроля при введении педикулярных винтов применяется относительно нечасто. Calcancie et al. предложили методику триггерной ЭМГ, позволяющей объективно оценить целостность стенок корня дуги позвонка при введении винта. Метод заключается в установке нескольких электродов на соответствующие группы мышц нижних конечностей, другой, монополярный, электрод фиксируется к педикулярному винту и на него подаются токи постепенно нарастающей силы. В ходе такой стимуляции игольчатые электроды в мышцах позволяют зафиксировать изменение потенциалов, передаваемых на эти мышцы. Повреждение стенки корня дуги приведет к значительному снижению пороговой величины силы тока, необходимой для вызова двигательного ответа в соответствующей группе мышц.
Значение пороговой величины силы тока в районе 10-20 мА со значительной долей вероятности позволяет судить о том, что целостность медиальной стенки корня дуги не нарушена. Пороговые значения более 15 мА характеризуются 98% вероятностью правильного расположения винтов в корнях дуг позвонков, что подтверждается данными послеоперационной КТ.
ЭМГ-мониторинг может применяться с любой из ранее описанных техник установки педикулярных винтов. Ретроспективный анализ точности положения 4857 педикулярных винтов, установленных с использованием ЭМГ-мониторинга в сочетании с непосредственной пальпацией костных стенок корней дуг и стандартным интраоперационным флюороскопическим контролем, продемонстрировал достаточно высокую точность установки винтов и лишь небольшое число осложнений. Основным недостатком данной методики являет то, что информация о нарушении целостности стенок корня дуги у хирурга появляется только тогда, когда винт уже будет введен, т.е. когда возможное повреждение того или иного нервного образования уже может случиться.
е) Заключение. Транспедикулярная фиксация является надежной и общепринятой методикой стабилизации позвоночного столба. Точность и правильность установки винтов требует от хирурга четкого понимания анатомии позвоночника и нюансов его строения на различных уровнях. Существует несколько техник установки педикулярных винтов, позволяющих повысить безопасность и точность этого процесса. Возможности каждой из них во многом зависят от опыта и навыков каждого конкретного хирурга. Техника «свободной руки» считается вполне приемлемой методикой, однако она должна применяться только хирургами, имеющими достаточный опыт хирургических вмешательств на позвоночнике и хорошо знающими обо всех нюансах его анатомии.
Большинство же хирургов добиваются достаточно точного расположения винтов, используя интраоперационный флюороскопический контроль, компьютерную навигацию или ЭМГ-мониторинг. Каждый хирург должен использовать ту методику, которой он владеет лучше всего и которая позволяет ему добиваться максимальной точности установки педикулярных винтов.
а - Навигационная рабочая станция и инфракрасный излучатель с камерами.
б - Навигационный зонд и направитель сверла, предназначенные для операций на позвоночнике.
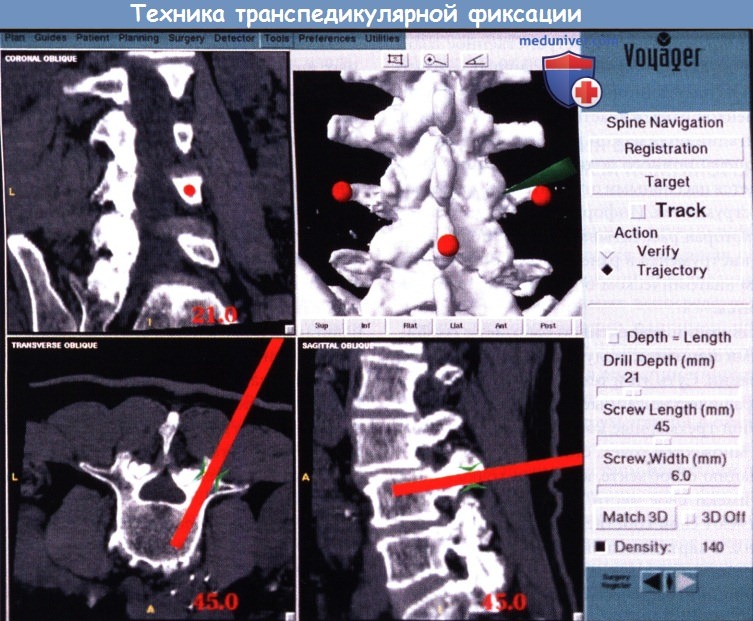
Изображения на экране рабочей станции навигационной системы в ходе введения педикулярного винта в L3 позвонок.
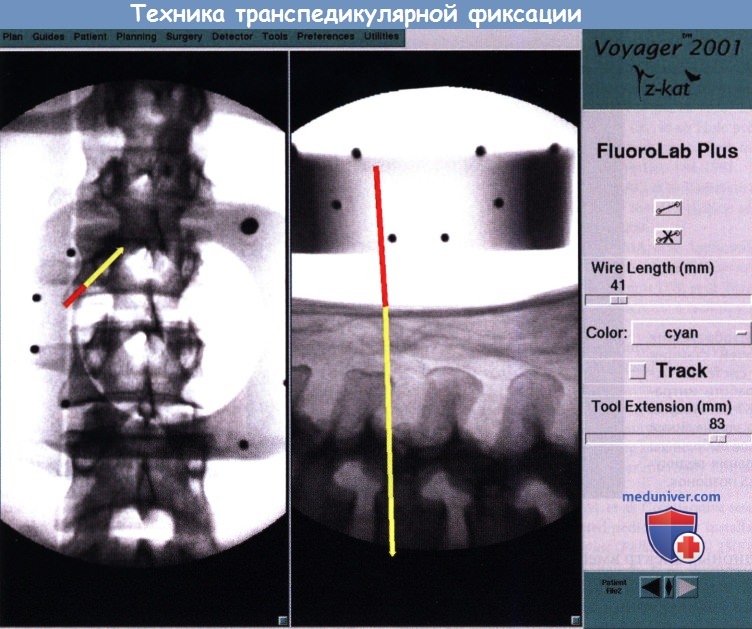
Экран рабочей станции флюороскопической навигационной системы.
Представлены стандартные прямая и боковая проекции с нанесенной на них траекторией введения винта (стрелки).
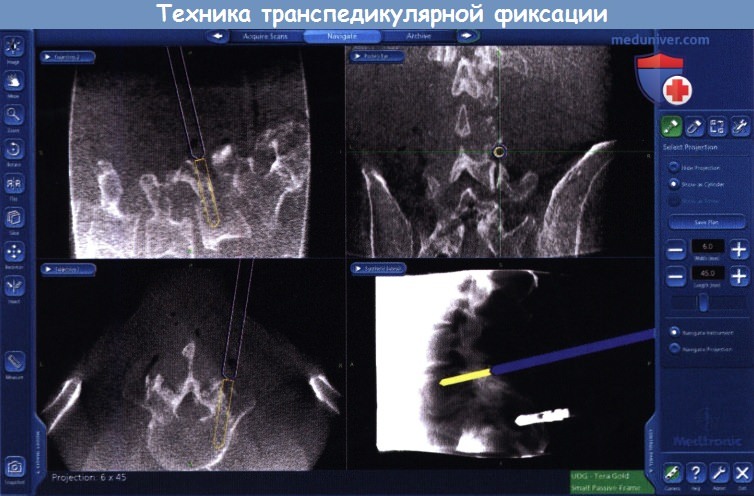
Изображения на экране рабочей станции навигационной системы, использующей в работе интраоперационную КТ-навигацию.
Изображенные на экране линии представляют собой выбранную траекторию введения педикулярного винта в L5 позвонок.