Техника эндоскопического трансорального доступа к краниовертебральному сочленению
а) Актуальность. Применение эндоскопического оборудования при трансоральном доступе улучшает визуализацию по сравнению со стандартным доступом, а также сводит к минимуму необходимость рассечения нижней челюсти, верхней челюсти по Лефор или вскрытия гайморовых пазух для лучшего обнажения анатомических структур краниовертебрального сочленения. Сложность удаления зубного отростка с применением стандартного трансорального доступа обусловлена глубоким расположением указанных структур и, как следствие, трудностями при их безопасном обнажении; кроме того, манипуляции хирургическими инструментами ограничены недостаточной шириной операционной раны.
Расширения трансорального доступа позволяют применять его при различных видах очагов поражения, расположенных кнутри от твердой мозговой оболочки, в том числе менингиом, а также хордом и хондросарком с интрадуральным распространением. Основные трудности при резекции интрадуральных объемных образований связаны с необходимостью последующего герметичного ушивания дефекта твердой мозговой оболочки.
Расширением эндоскопического трансорального метода стало применение роботизированной хирургической системы Да Винчи, разработанной в Калифорнии, США. Трансоральный роботизированный доступ является новым методом, впервые примененным в Университете Пенсильвании при лечении злокачественных опухолей головы и шеи. При данном доступе двухканальный эндоскоп обеспечивает трехмерное изображение, а робот позволяет выполнять тонкие манипуляции в пределах анатомических границ полости рта. Применение робота Да Винчи при трансоральном доступе решает проблему визуализации структур благодаря хорошей освещенности раны и высококачественному трехмерному изображению, которые сохраняются даже в нескольких сантиметрах от слизистой оболочки.
При этом не требуются травматичные хирургические приемы, такие как рассечение нижней челюсти или мягкого неба, которые являются причиной выраженного болевого синдрома и других осложнений в послеоперационном периоде. Использование робота также расширяет возможности при интрадуральных вмешательствах, поскольку робот обеспечивает выполнение тонких манипуляций при ушивании дефекта твердой мозговой оболочки в узком пространстве операционной раны. Тем не менее, недостатком робота Да Винчи является отсутствие инструментов для резекции кости, таких как кусачки и сверла; в связи с этим, при трансоральном роботизированном доступе для удаления костной ткани необходимо участие не только хирурга, сидящего за пультом управления, но и ассистента, находящегося непосредственно у операционного стола.
б) Подготовка и положение пациента при эндоскопическом трансоральном доступе к краниовертебральному сочленению. В ходе подготовительного этапа крайне важно четкое взаимодействие хирургической и анестезиологической бригад. Необходимо правильно выбрать интубационную трубку и установить ее надлежащим образом. Оптимально использование армированной интубационной трубки, выведенной по средней линии в направлении ног пациента.
Все установленные в сосудах катетеры также направляют в сторону ног пациента, чтобы доступ к ним не препятствовал визуализации и выполнению хирургических манипуляций хирургом и роботом. Мониторинг соматосенсорных и моторных вызванных потенциалов при проведении операции позволяет контролировать положение пациента таким образом, чтобы не вызвать компрессию структур в позвоночном канале.
Пациента фиксируют в положении на спине и слегка разгибают шею, насколько это допустимо с учетом имеющейся патологии. Голову закрепляют с помощью фиксатора Мэйфилда (Mayfield) или ортеза в зависимости от степени нестабильности позвоночника. На данном этапе проводят рентгеноскопию в боковой проекции для определения расположения костных структур, что может быть повторно проведено интраоперационно; после рентгеноскопии, аппарат передвигают к ногам пациента. При роботизированном трансоральном доступе робота размещают у головного конца операционного стола над головой пациента для оптимизации использования всех трех манипуляторов робота.
Бинокулярный эндоскоп размещают по срединной линии, а два рабочих манипулятора занимают латеральное положение так, чтобы не оказывать давление на углы рта. Операцию начинают под контролем эндоскопа прямого наблюдения (0°) диаметром 12 мм, который заменяют эндоскопом наклонного наблюдения (30°) при необходимости дополнительной верхней или нижней визуализации. В левый манипулятор робота помещают подвижный диссектор Maryland, а в правый — шпателевидный монополярный электрокоагулятор. Во время эндоскопических операций хирурги стоят по обе стороны от головы пациента для максимального удобства и хорошей визуализации; монитор располагают у головного конца операционного стола. Используют стандартный инструментарий, применяемый при эндоскопических операциях.
в) Техника эндоскопического трансорального доступа к краниовертебральному сочленению. Возможно применение нескольких разновидностей роторасширителей, включая модели Dingman или Crowe-Davis (производство фирмы Storz). Амплитуда раскрытия рта не должна превышать 4 см; особую осторожность следует соблюдать у пациентов с тризмом и патологическим состоянием височно-нижнечелюстного сустава. Два резиновых катетера проводят через полость носа и выводят через полость рта сбоку для отведения небного язычка и мягкого неба.
Для этой цели возможно наложение швов на небный язычок и выведение нитей через полость носа. Следует также использовать пластины для защиты зубов и избегать компрессии языка между зубами и роторасширителем или интубационной трубкой.
Разрез слизистой глотки по срединной линии обычно выполняет ЛОР-хирург, управляя роботом с помощью консоли; ассистент использует стандартный вакуумный аспиратор типа Frazier. Располагаясь справа от пациента, ассистент может наблюдать за действиями хирурга, глядя на монитор. Кроме того, занимая эту позицию, ассистент может контролировать взаимное расположение манипуляторов робота и структур полости рта, для предотвращения их непреднамеренного повреждения. Визуализируют переднюю дугу позвонка С1, тело позвонка С2, межпозвонковые пространства, а также евстахиевы трубы, обнажать которые следует с особой осторожностью, чтобы не нарушить их целостность.
Ткани рассекают быстро: подвижным диссектором Maryland обеспечивают натяжение слизистой, а монополярным электрокоагулятором рассекают слои мягких тканей до передней дуги позвонка С1, затем продолжая разрез в нижнем направлении до тела позвонка С2, положение которого определяют с помощью рентгеноскопии. Аналогично рассекают переднюю продольную связку для обнажения передней атланто-осевой мембраны сверху, дуги позвонка С1, а также зубного отростка и тела позвонка С2. Все вышеуказанные манипуляции осуществляет хирург с помощью пульта управления, с минимальным участием ассистента. При необходимости мягкие ткани прошивают и отводят на нитях.
После завершения рассечения мягких тканей основные манипуляции выполняет нейрохирург, который вручную удаляет необходимый объем костной ткани, поскольку робот Да Винчи не оснащен необходимыми инструментами. Операция приобретает характер классического эндоскопического вмешательства, в ходе которого хирург, находящийся за пультом управления, под контролем 3D-визуализации оказывает необходимую помощь в удалении костных и связочных структур. Переднюю дугу позвонка С1 удаляют с помощью двух распилов с максимальной дистанцией 16 мм, что соответствует медиальной границе боковых масс атланта.
Следующим этапом определяют связку верхушки зуба. Используют метод удаления костной ткани, предложенный Хейдом (Haid). Зубной отросток рассверливают бором сверху вниз, а затем оставшийся слой кости вместе со связкой верхушки и крыловидными связками удаляют с помощью кюреток и кусачек Kerrison. Благодаря преимуществам эндоскопической 3D-визуализации, хирург может исправлять положение и направление разреза.
Если единственной целью операции является декомпрессия структур, то после удаления необходимого объема костной ткани описанным выше способом, манипуляторы робота приводят обратно к операционной ране для осуществления максимально точных мелких движений при ушивании слизистой оболочки задней стенки глотки ЛОР-хирургом. С помощью подвижных сшивателей, установленных в два манипулятора робота, хирург ушивает мышечный слой и слизистую оболочку. Для этого накладывают однослойной шов викрилом 3-0; шов накладывается роботом, которым управляет хирург с помощью пульта.
Ушивание верхней части разреза может потребовать использование эндоскопа наклонного наблюдения (30°), тогда как среднюю часть шва накладывают под визуализацией эндоскопом прямого наблюдения (0°).
Если при трансоральном роботизированном доступе необходимо обнажить интрадуральный очаг поражения, после удаления необходимого объема костной ткани нейрохирургом операцию продолжают с помощью манипуляторов робота, которые приводят обратно к операционной ране. Место за пультом управления занимает нейрохирург (в США эта процедура запрещена к выполнению нейрохирургом, поэтому может быть осуществлена только после письменного разрешения консилиума).
Хирург, управляя роботом, вскрывает твердую мозговую оболочку линейным разрезом лезвием № 11 и расширяет разрез в нижнем и верхнем направлениях с помощью эндоскопических ножниц. Аналогичным образом возможно вскрытие твердой мозговой оболочки под эндоскопической визуализацией. Лоскуты твердой мозговой оболочки закрепляют к слизистой оболочке с помощью швов-держалок или выводят через ротовую полость на зажимах. Следующим этапом хирург может вскрыть паутинную оболочку. После этого выполняют необходимые интрадуральные манипуляции.
По окончании интрадурального этапа операции, способ ушивания твердой мозговой оболочки выбирают в зависимости от особенностей доступа. При роботизированном доступе ушивание проводят с помощью манипуляторов робота прерывистым швом нитями 4-0 и U-образными нитиноловыми скобами (разработаны в Medtronic, США). В зависимости от предпочтений хирурга, при ушивании могут также быть использованы трансплантат твердой мозговой оболочки или фибриновый клей. При наличии только эндоскопического доступа используют лоскут слизистой оболочки и/или трансплантат твердой мозговой оболочки с фибриновым клеем. На следующем этапе ушивают слизистую оболочку прерывистым швом.
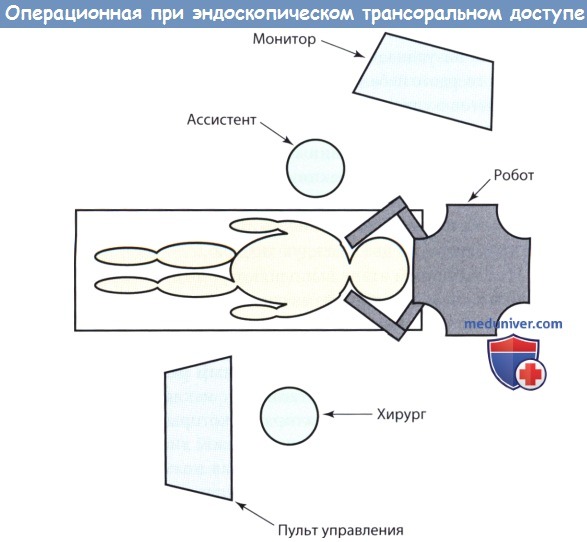
План операционной для проведения операции трансоральным доступом с помощью роботизированной техники.
Показано положение основного хирурга за пультом управления и ассистента у операционного стола.
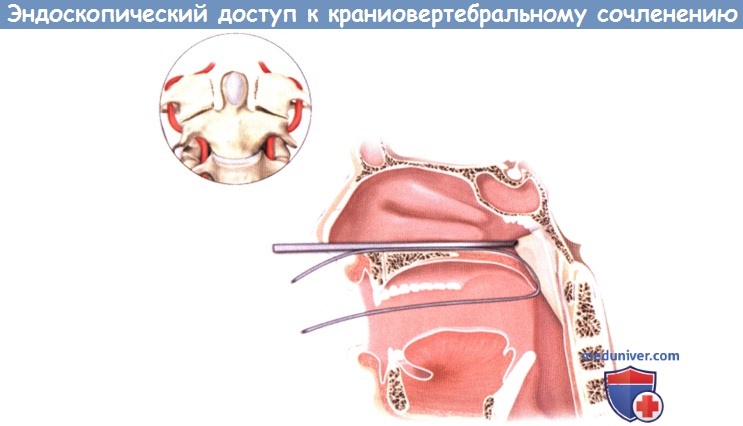
а - Манипуляторы робота введены через полоть рта и наклонены к головному концу до носоглотки и основания черепа.
б - Камера и манипуляторы робота введены через рот, который удерживается в открытом состоянии с помощью трансорального ретрактора модели Crowe-Davis.
Красные резиновые трубки используют для отведения мягкого неба. Максимальный диаметр раскрытия рта для осуществления разреза уменьшен до 4 см.
Интраоперационная рентгенография в боковой проекции при трансоральном доступе с применением роботизированной техники.
PC — ретрактор модели Crockard; С2—тело позвонка С2; PD — ретрактор модели Dingman;
ЭК — 5-мм манипулятор с монополярным электрокоагулятором; ДМ — 5-мм манипулятор с диссектором Maryland.
а - Трупный материал: удаление верхушки зубного отростка после сверления.
б - Эндоскопия трупного материала: использование манипуляторов для ушивания твердой мозговой оболочки; выполняют наложение швов.
Анатомия костных структур и траектория позвоночной артерии на отрезке, обнажаемом при переднем доступе к краниовертебральному сочленению.
Позвоночные артерии лежат с боковых сторон, но возможны аномалии их расположения, при которых артерии лежат медиально.