Внедрение компьютерной томографии (КТ) в клиническую практику возобновило интерес к стереотаксической нейрохирургии. С помощью КТ внутримозговые поражения хорошо визуализируются, а снимки просты в использовании системы стереотаксических координат. После введения магнитно-резонансной томографии (МРТ) в 1980-х, эти наборы данных были также внедрены в стереотаксическую технику и могут быть использованы как для планирования, так и для стереотаксической хирургии.
Стереотаксические методы были разработаны для точной верификации патологических поражений в головном мозге. С технической точки зрения цель и точка доступа выбирается так же, как при стереотаксической биопсии. Входная точка отмечает место трепанации черепа. Как правило, катетер устанавливается у входной точки, и согласно этому выполняется доступ по намеченой траектории, до достижения конечной точки, например, опухоли. Келли разработал технику объемной стереотаксической операции: «система навигации».
В отличие от стереотаксической техники, которая указывает конечную точку в пространстве, объемный метод обеспечивает расчет объема опухоли и, следовательно, границы поражения. Для математического расчета необходима компьютерная система.
Хотя рамная стереотаксическая техника очень точна, и позволяет выявить глубокие поражения, вся система является громоздкой и мешает хирургической процедуре.
В 1986 г. Roberts et al. ввел в клиническую практику бескаркасные нейронавигационные системы. В результате, больше не требовалась рамная система для расчета трехмерного пространства черепа и головного мозга, она была заменена на датчик, приклеенный к голове пациента. В отличие от рамной системы, при стереотаксическом наведении, информация о фактическом положении инструмента во время операции обеспечивалась за счет бескаркасной системы нейронавигации.
Были разработаны различные методы нейронавигации и слежения за инструментами. Принцип работы основывается на улавливании ультразвукового импульса, подвижной механической «руки» и обнаружения инфракрасного импульса оптическими методами.
В настоящее время нейронавигационные системы стали стандартом в современной нейрохирургии, в основном это бескабельные системы на светоизлучающих диодах (СИД).
а) Техника безрамной нейронавигации. В данной статье представлены разработки безрамных систем нейронавигации Brain LAB. Различными компаниями предлагаются многочисленные навигационные системы, аналогичные по конструкции и функции. Эта система навигации является светодиодной системой с пассивным отражением инфракрасного излучения от специального покрытия сферических датчиков. Основа с датчиками в форме «звезды», называемая также «эталонная звезда», жестко закрепляется на голове пациента с тремя отражающими датчиками.
Инфракрасные вспышки излучаются LED-системой и отражаются датчиками. Инструмент для регистрации пациента, стрелка-указатель, имеет два датчика. Геометрия указателя определяется компьютерной системой навигации. При определении положения трех датчиков «эталонной звезды» относительно положения двух датчиков указателя компьютер рассчитывает локализацию кончика стрелки. Перед проведением томографии на голове пациента отмечается пять контрольных точек (КТ или МРТ). Данные передаются в станцию планирования. Изображения отображаются на экране компьютера; интересующие области (например, опухоль) выделяются цветом.
После окончания предоперационного планирования данные передаются из блока планирования в систему нейронавигации. Снимки отображаются на экране компьютера в трех плоскостях (фронтальной, аксиальной, сагиттальной). Перед операцией фиксируется голова пациента, а звезда закрепляется на держателе головы. Оцифровка поверхности головы проводится касанием кончиком стрелки контрольных точек на коже. На основе взаиморасположения стрелки и звезды компьютер может вычислить положение головы пациента.
Альтернативой установок с использованием системы координат служат установки с лазерной системой регистрации контура головы. Преимуществом этой системы является процедура контурной регистрации без использования дополнительных кожных маркеров. После регистрации, указатель может использоваться для навигации. Положение указателя отображается на экране компьютера в реальном времени, и можно провести предоперационное планирование. Кончик инструмента может быть виртуально продлен для расчета наилучшей траектории до цели.
На различные хирургические инструменты могут быть установлены специальные адаптеры (например, биполярные щипцы), и они тоже могут быть использованы для навигации. Даже операционный микроскоп может быть оснащен навигационным устройством для отображения фокуса на экране компьютера. Главный дисплей позволяет в этом режиме сосредоточить контуры опухоли в центре поля зрения микроскопа. Техника слияния изображений позволяет интегрировать различные результаты ПЭТ и МРТ в единой нсйронави-гационной системе. Объединение ПЭТ с навигационными данными полезно при лечении хорошо визуализируемых при ПЭТ глиом или расплывчатой визуализации контуров опухоли по данным МРТ или КТ.
б) Интраоперационные изображения. Безрамные системы нейронавигации в современной нейрохирургии, как правило, выполняются на основе предоперационной нейровизуализации. Хотя при правильном использовании нейронавигации могут быть достигнуто полное удаление видимой опухоли, в некоторых случаях бывает полезна и интраоперационная визуализация. Мозг не является устойчивым органом, смещение до 1 см способно полностью изменить анатомическую ситуацию. Сдвиг границ мозга может быть вызван его отеком, особенно после вскрытия твердой мозговой оболочки и удаления опухоли. Таким образом, интраоперационная визуализация может иметь решающее значение для оптимальной резекции опухоли при обновлении фактической анатомической ситуации.
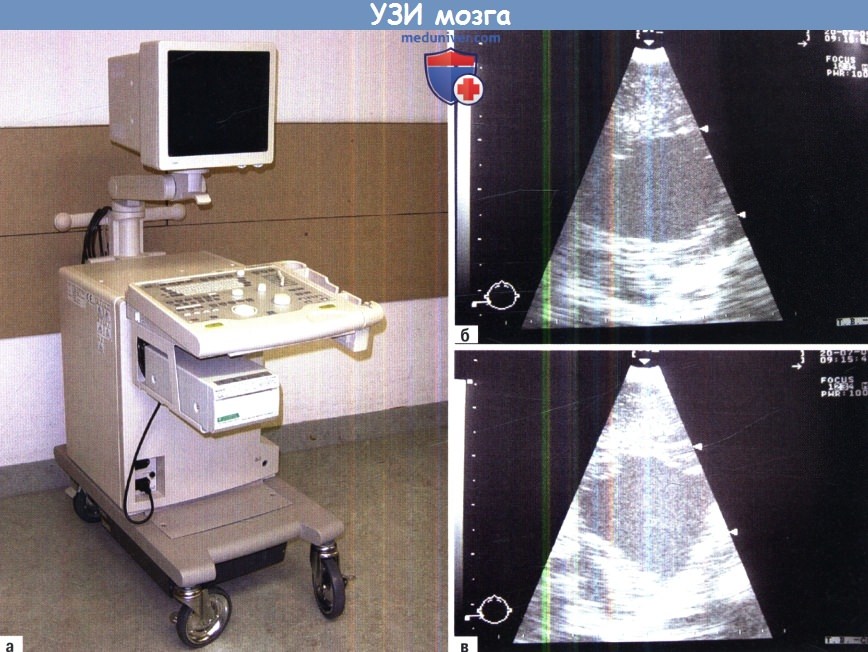
Ультразвуковое исследование уже давно используется для локализации патологических структур во время оперативного вмешательства. Этот метод используется для идентификации глубинных поражений. Возможность управляемой резекции с помощью ультразвуковой навигации вызывает разноречивые мнения. Разработки в данной области выглядят обнадеживающе, особенно возможность трехмерного ультразвукового исследования, которое может привести к новому качеству интраоперационной визуализации. Интеграция в нейронавигационную систему ультрасонографии в режиме реального времени, также как и 3D-визуализация способны улучшить хирургические результаты.
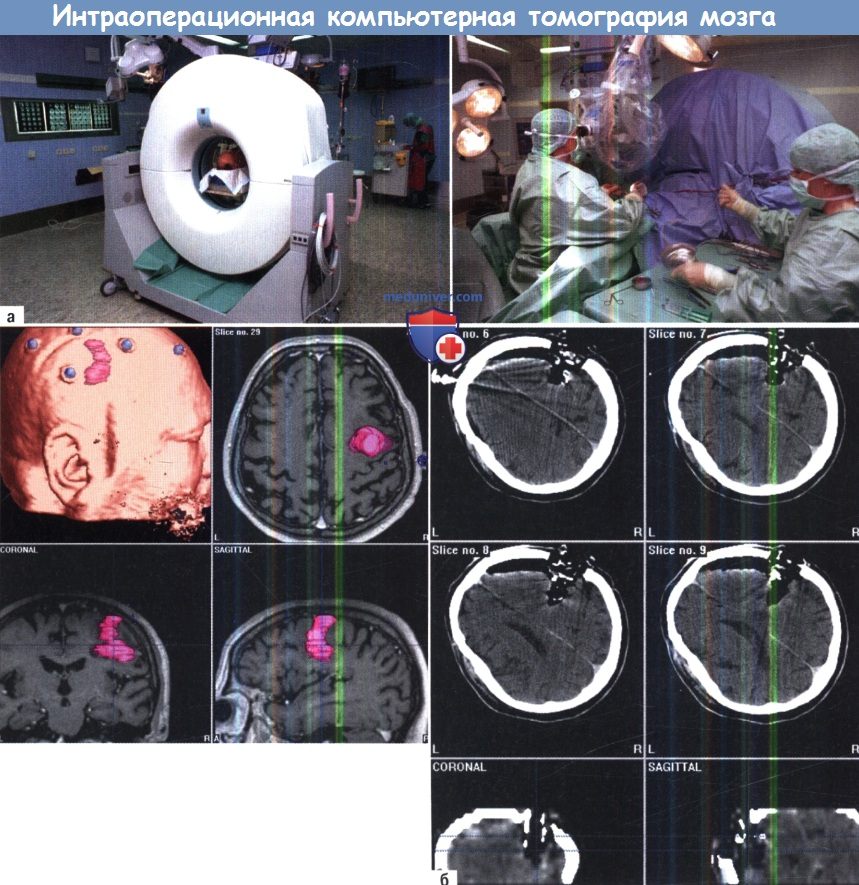
Lunsford и Okudera сообщали о использовании интраоперационной компьютерной томографии в 1980-х годах. В настоящее время используются мобильные компьютерные томографы с высоким качеством изображения. О полезности и широте использования, а также успешности интеграции в условиях операционного зала уже сообщались. У нас накоплен большой опыт работы с мобильными компьютерными томографами. Мобильный томограф может быть легко интегрирован в работу операционной; дополнительное оборудование не требуются. Тем не менее, в хирургии опухолей, использование интраоперационного контроля резекции ограничено плохой визуализацией низкодифференцированных опухолей. Контуры низкодифференцированной глиомы на КТ изображениях недостаточно четкие.
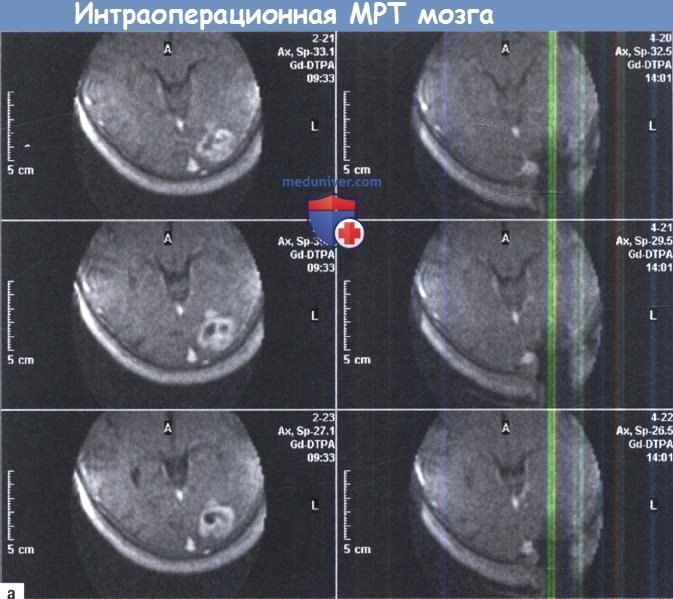
Для этой цели методом выбора может быть интраоперационная МРТ (iMRI). Использование iMRI в нейрохирургии началось в 1994 г.. Напряженность поля MR колеблется между 0,12 и 1,5 Тесла, но большинство центров использует системы со слабым полем. Разработаны различные модификации iMRI. При использовании вертикально открытых МРТ, хирургическая процедура выполняется при положении пациента внутри сканера. В этой связи, оперативная укладка совершенно иная, чем без iMRI. Рабочее пространство для хирурга очень ограничено. Необходимы совместимые с МРТ хирургические инструменты, а также совместимый микроскоп. При мобильной МРТ в этом нет необходимости.
Sutherland et al. описали магнитно-резонансный томограф, который крепится к потолку. Сканер может быть перемещен к пациенту при необходимости iMRI. Кроме того, MR сканер может находиться в другой комнате рядом с операционной, и пациент может быть перемещен в сканер. Операция проводится на расстоянии от магнита, и предоперационные настройки не требуют изменений (например, положение пациента или хирурга). Оба варианта предполагают очень большую операционную или две комнаты. Другие авторы сообщают о компактном мобильном МР-сканере с интегрированной системой навигации, данные которой могут быть сохранены в соответствии с положением операционного стола.
Сканер задрапирован и может быть перемещен к пациенту, дополнительное оборудование не требуется. Данная установка полезна в хирургии низкодифференцированных глиом и аденомы гипофиза, также как и при стереотаксической биопсии, хирургии аневризм, эпилепсии и позвоночника. В принципе, iMRI может применяться во всех ситуациях, требующих интраоперационной визуализации.
Несмотря на высокую стоимость iMRI, эта технология, вероятно, станет стандартом в современной нейрохирургии. Высокопольные сканеры обеспечивают высокое качество изображений анатомических и функциональных структур с помощью fMPT, диффузно-взвешенной МРТ, МР-ангиографии, диффузно-тензорных изображений и МРТ-спектроскопии.
Еще один интересный метод, который используется для получения интраоперационной информации о функциональных зонах, включает сочетание навигации с электрофизиологическими методами. Отношение опухоли к функциональным зонам мозга, особенно во время операции в центральном регионе может быть визуализировано после передачи функциональных данных, например, от прямых электрических корковых отведений к навигационной системе.
Кроме того, перспективы включают роботизированную хирургию с использованием навигации.
А. Ультразвуковые аппараты.
Б, В. Интраоперационное ультразвуковое исследование внутримозговых кистозных поражений.
А. Операционная с мобильным сканером компьютерной томографии.
Б. Дооперационные (слева) и интраоперационные КТ (справа).
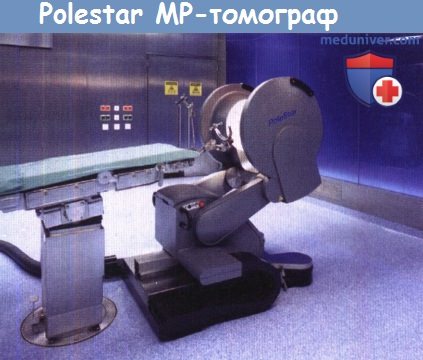
Polestar МР-томограф для интраоперационного применения.
Дооперационные (слева) и интраоперационные (справа):
А. МР изображения злокачественной глиомы.
Б. дооперационные (слева) и интраоперационные (справа) MR изображения аденомы гипофиза.